经历了两个月的初赛和延期的决赛,最终结果虽然不是特别满意,但也算人生的一个经历。
初赛
第一次参加这个比赛,还是比较激动的,赛队名字取了经典的HDU先锋队。初赛主要参加了事件相关电位ERP组的比赛,A榜的结果还算不错,拿了个第一。可能和A榜竞争不那么激烈(个人感觉)也有关系,毕竟其他赛队都是多年传承改进下来的代码。
到了B榜大家比赛就更激烈了,虽然相比A榜队伍少了,但是总体来看(提交次数)内卷更厉害了。
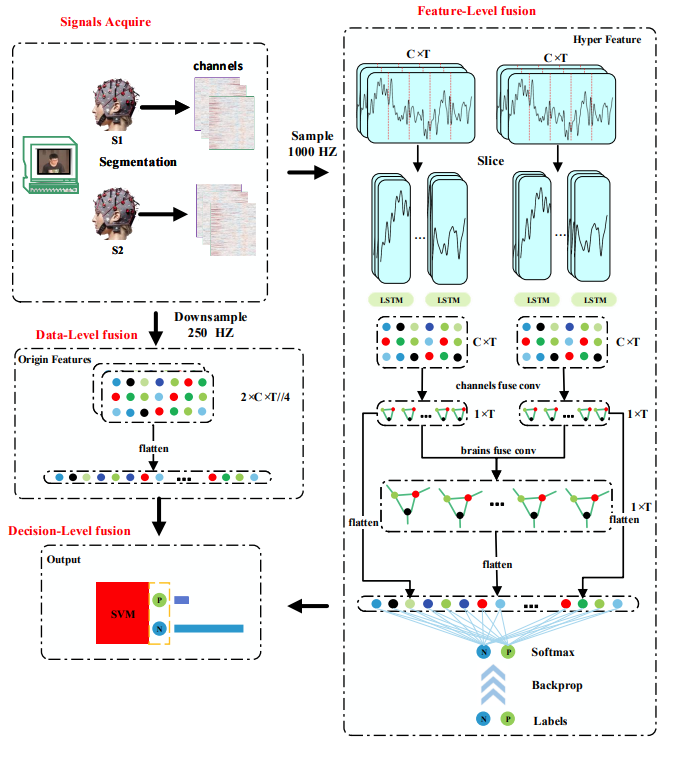
初赛的方法主要还是黎曼几何那一套,这套方法很经典,效果也很好,相比于深度学习神经网络来看,更具备实用性。
本来只是抱着试一下的心态参加这个比赛,没想到进了决赛,和导师说了之后也非常支持我去参加决赛。
决赛
决赛也是一波三折,因为疫情原本八月份的决赛直接延期到不知道啥时候,后面确定在9月份。
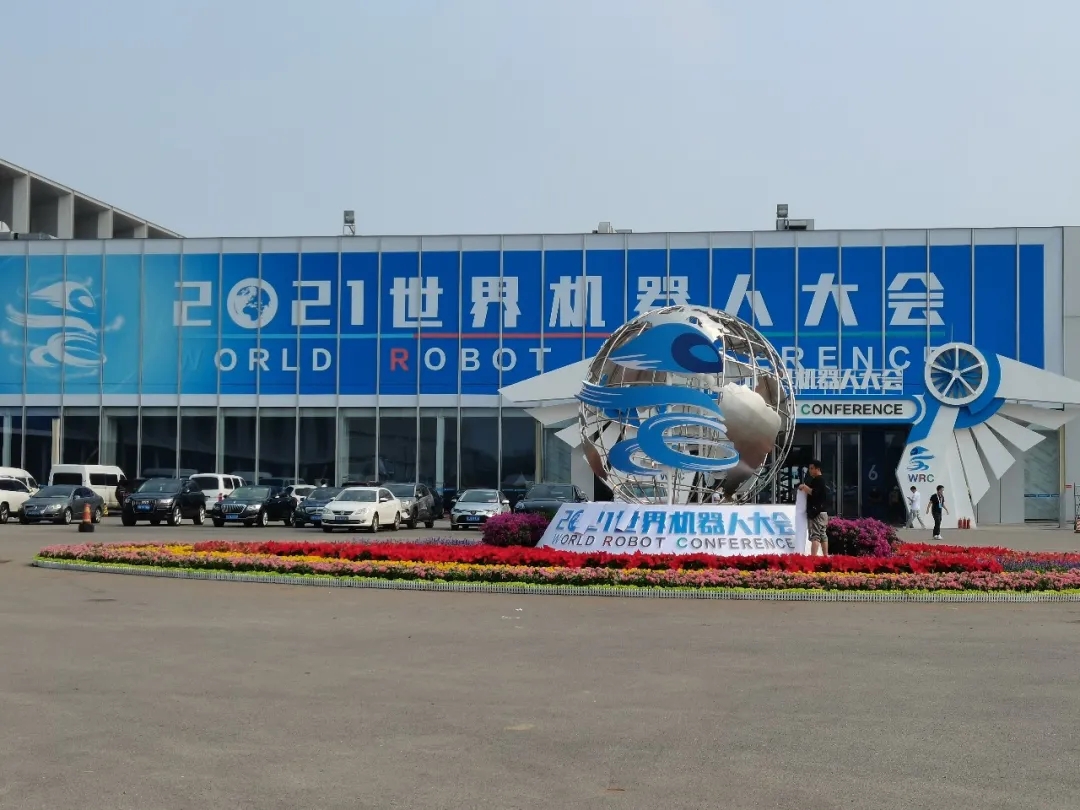
到了世界机器人大会会场感觉还是很恢宏。到处都是这个大会的宣传信息以及超大横幅。


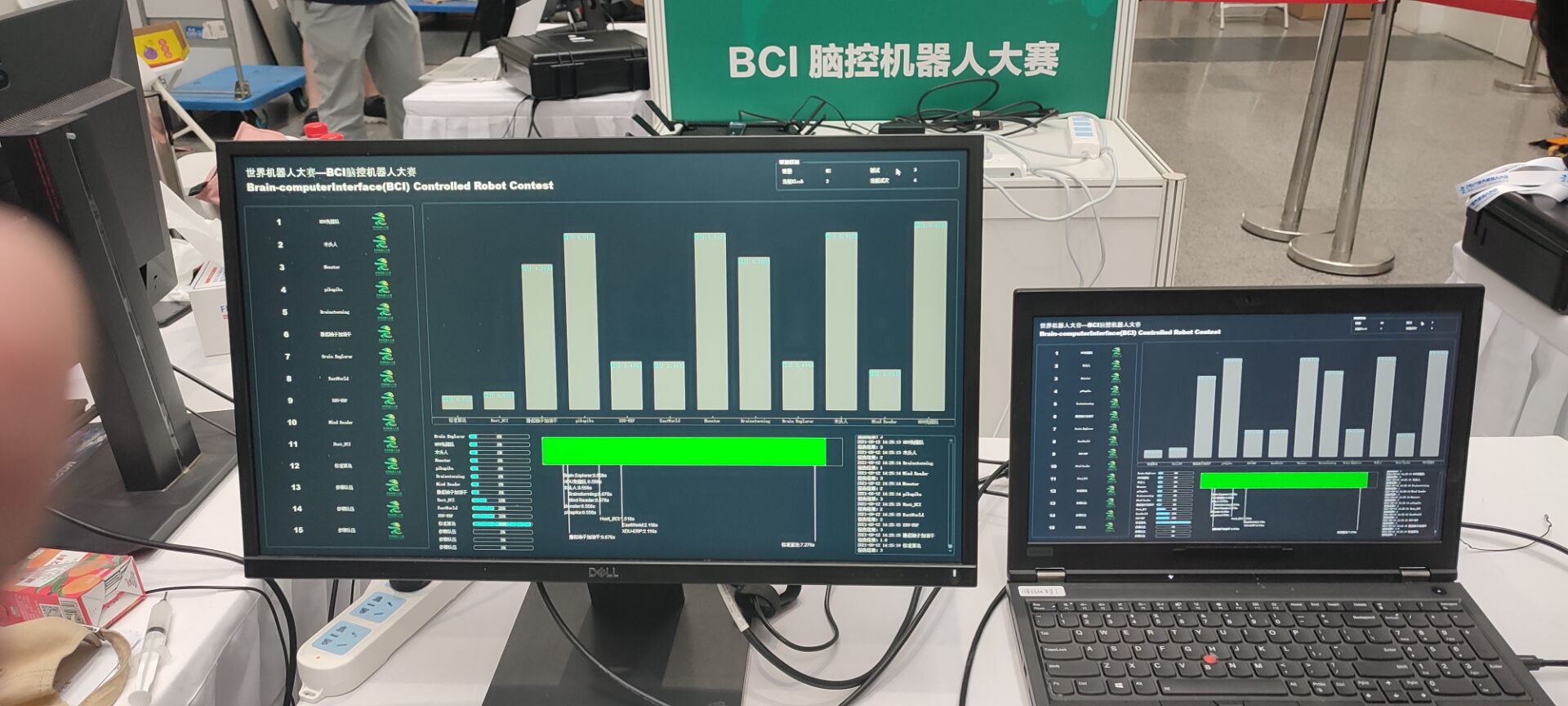
但是到了比赛现场就感觉稍微差了点,都是临时安排的座位。当然这个和大会本身所在的国际会展中心承包日期也有关系,没有多少时间能够布置比赛现场。
参加决赛的时候最多的感受就是这个比赛一直在等,等着提交代码,等着排队实机调试代码。 毕竟最后只有一次提交机会,不存在调参空间,但是这样反倒也增加了模型的可靠性,如果能够在只有一次提交机会的情况下跑起来,拿到一个好结果,数据还是在线采集的,那这个模型的可靠性就毋庸置疑了。
但是因为调试的机子是大家共用的,导致我的ERP模型不知道为什么超时了(最后发现其他赛队方法也大同小异,黎曼几何那一套 但是没超时)。最后保险起见临时换了模型,模型直接就不会预测结果了,只会预测非目标,就很差。
后续的运动想象赛道和情感赛道当做是运气好,结果还不错。运动想象有训练第四,情感脑机接口赛道第二。
有一说一,虽然是差不多的方法,但是华科前面加了一层迁移学习效果确实很不错,值得我们学习。
![欧式空间对齐的迁移学习[论文复现]](/images/20210928154110.png)